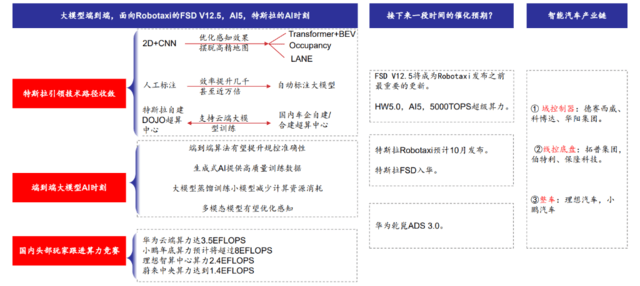
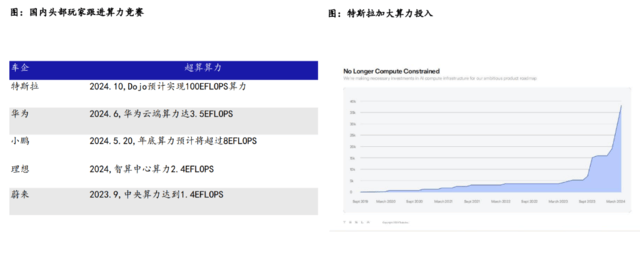
���ܲ�����Robotaxi����(te)˹����AIʱ��
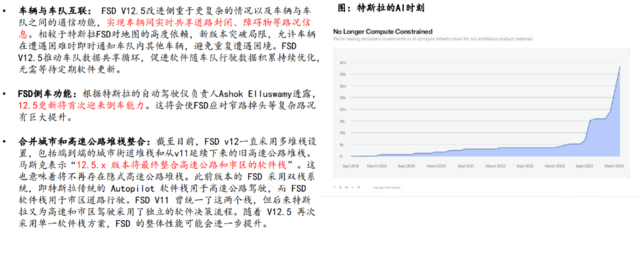
��(te)˹����AIʱ�̡�AIͷ����(wan)�ң�Ϊ��(le)�����������ƣ���(te)˹��������������(le)AI��Ͷ�ʣ���(zi)����ʻ�ۼ�(ji)Ͷ��Ԥ��(ji)��(chao)100����(mei)Ԫ���˵�������FSD��FSDV12��ʼ���ָ��������������ͻ(tu)��10��Ӣ�V12.4���������������������������13��Ӣ����(yi)�ϡ����⣬Optimus Gen 2 ����(xiang)�Ϻ��������복��ͬԴ��AI�������Ӿ��������FSDоƬ��ģ��(fang)����ѵ������(te)˹��ӭ��(lai)AIʱ�̡�
AI������(te)˹��Robotaxi����(te)˹��RobotaxiԤ��(ji)��10�·�������˹��(ke)��ʾ����Ҫ���Robotaxiǰ��������Ҫ���(ji)���ģ���(yin)�Ƴٷ�����(ri)�ڶ�(er)����(lai)�Ķ���ʱ�佫�ù�˾�л���չʾһЩ���������ݡ���FSD V12.5����ΪRobotaxi����֮ǰ����Ҫ�ĸ��¡���(te)˹��2024��ɶ������˹��(ke)��ʾ��Ŀǰ��(te)˹�����ڿ���HW5.0�������ܽ���HW4.0��10����Ԥ��(ji)Լ(yue)18�������Ƴ���HW5.0 ������Ԥ��(ji)5000TOPS��AI����Robotaxi���ٶ�ApolloADFM��ȫ(quan)����֧��ȫ(quan)��(wu)�˼�ʻ����(zi)����ʻ��ģ�ͣ�֧��1500ƽ����������3���½�����Ӫ��������չ�ٶ�����6����
�ܲ����ܡ�����(te)˹��FSD��(ru)��·�����롣�ܲ�������2024���һ�����ṩ��(le)82.6����(zi)����ʻ���з���ͬ������25%���ۼ�(ji)�ṩ�����ѳ�(chao)��600�������ܲ����ܽ�פ���е�ʱ���ߣ�����(yi)�������Թ��ɡ������������ߡ�>�ܲ����ܽ�פ�Ե�/��Ӫ/��ҵ����>���복·��һ��(ti)���Ե㡱���ܲ����ܣ����õ���(zi)����ʻʾ������·��(ce)�����յ���ҵ����Ӫ��Ҳ����(le)��(te)˹��FSD��(ru)���ṩһ������·�����롣
��(te)˹����AIʱ�̣�AIͷ����(wan)��
�˵�������FSD��2024��3�£���(te)˹���Ƴ�FSD��Supervised��12.3.3�汾����(xiang)�Ƚ���(yu)FSD 11��FSD v12�����Եز�����(le)�˵��˵������缼�����˵���NN��������(yi)���õ�����ʹ�(chu)�����Ӽ�ʻ��(huan)�������ټ�ʻ��Ա�ĸ�(gan)Ԥ�������(zi)����ʻ�ľ�ȷ(que)�Ⱥ���(zi)�����ȡ�6��5��(ri)����ʼ����(te)˹��Ա����������FSD v12.4��7��7��(ri)����(te)˹�����û�������(le)FSD v12.4.3��������(lai)��FSD V12.5����ΪRobotaxi����֮ǰ����Ҫ�ĸ��¡�
FSD v12�в��ö˵���NN����(yi)ǰ��AI��(gan)֪+����(jian)��أ�����ģ�ͽ�������(ru)��Ƶ����ѧϰ����(er)��(wu)�赥�����룬�����(huo)�����(dai)�롣��(gan)֪-����-ִ����FSD�Ļ�����(liu)�̣���v11�У���(gan)֪����Ҫͨ���Ӿ���ʽ/�״�(da)��ʽ��ȡ(qu)��Χ����(ti)��Ϣ��ʶ��ͱ�ʶ���࣬���߽���������(yu)��(shi)����Ϊ��д�õĿ��ƹ���(dan)��v12������(le)�˵���NN��������(gan)֪�β���(zai)��Ҫʶ��ͱ�ʶ�����߽�Ҳ����Ҫ��(shi)����Ϊ��д���ƹ���ֻ��Ҫ����(ru)������Ƶ����NNѧϰ�����ֱܷ���ڲ�ͬ���(kuang)����Ҫ��(zuo)ʲô����ʹ����(te)˹����FSD V12�м�����(le)100����(dai)�룬ʹ������(bian)�������(huo)��ͬʱ��û���������ӵ����(kuang)����(reng)���ڲ���Ϥ�ĵ����Ϲ�����

��(te)˹����AIʱ�̣���(zi)����ʻ�����ۼ�(ji)Ͷ��Ԥ��(ji)��(chao)100����(mei)Ԫ��
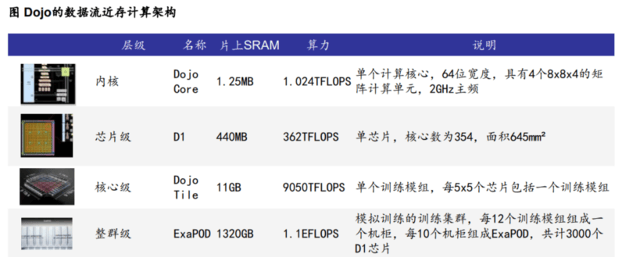
��(chao)������ʽ�Ͷ��(ru)����˹��(ke)Ԥ��(ji)��(te)˹���������й������ۼ�(ji)Ͷ�ʳ�(chao)100����(mei)Ԫ���ڽ���1��27��(ri)����˹��(ke)������(te)�ϱ�ʾ��DojoĿǰ����������(xiang)����(yu)1���Ӣΰ��(da)H100���������AI����߱�����������ôĿǰ��Ҫÿ(mei)��Ͷ��(ru)��ʮ����(mei)Ԫ����˹��(ke)��ʾ��(te)˹����ѵ����(ji)�㡢���ݹܵ�����Ƶ�洢������ۼ�(ji)Ͷ�ʽ��ڽ��곬(chao)��100����(mei)Ԫ��
���ݺ蹵������Ҫ���ɳ�(chao)��ĺ��ı��ݡ����ȣ��κ�ģ�͵�ѵ����������(yu)�����������ɿص�ѵ�����ݣ���(er)��(te)˹��FSD��(zi)�Ƴ���(yi)��(lai)�ۼ�(ji)���г�(chao)����(le)10��Ӣ���λ��(te)˹��ѵ��ģ���ṩ��(le)�����ѵ�����ݡ���Σ��������棬��ģ��ѵ������Ҫǿ�����������(te)˹��Ŀǰ����ӵ��3��-3.5���Ӣΰ��(da)H100оƬ����(er)��һ��(dai)��Gork������Ҫ10���H100��������յ���4.5����(mei)Ԫ/�ţ���ô10���H100�ܼ�ֵ(zhi)�ߴ�(da)45����(mei)Ԫ����(xiang)����(yu)300��������ҡ�
��(te)˹������AI������ս������ͷ����(wan)�Ҹ�������������
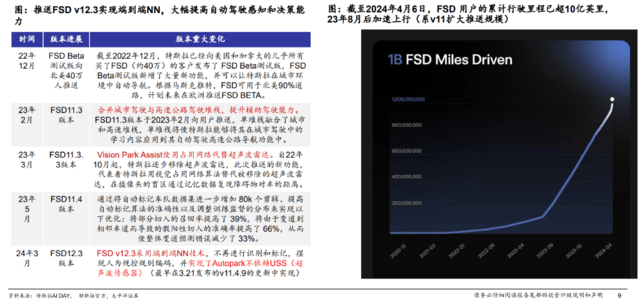
��(te)˹��FSD��V12��ʼ���ָ��������������ͻ(tu)��10��Ӣ���ָ���ڹ��
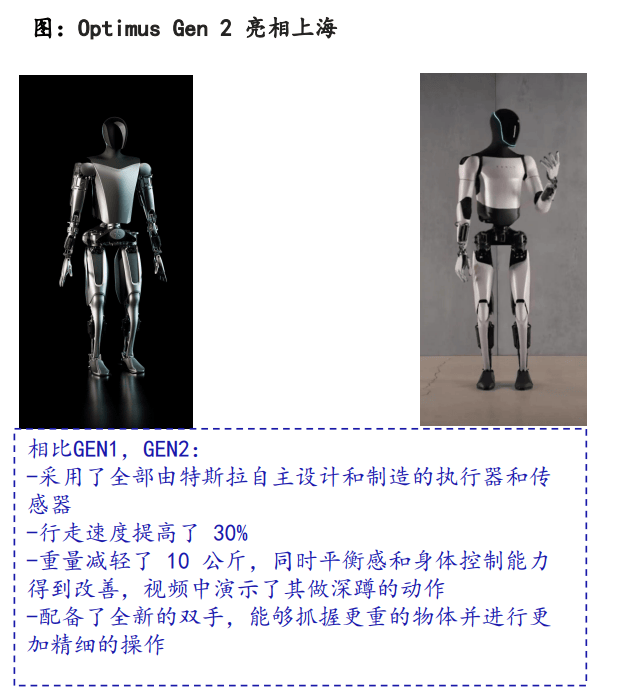
Optimus Gen 2�������복��ͬԴ��AI�������Ӿ��������FSDоƬ��
�����복��ͬԴ��AI�����������Ӿ��������FSDоƬ��Optimus���λ������ڼ�����ȡ(qu)����(le)�ش�ͻ(tu)�ƣ��������ܹ�(gou)��������(te)˹����ع������е�ص�Ԫ�ķ�װ�������������(yu)��ȫ(quan)�ڻ����˵�Ƕ��(ru)ʽ FSD ��(ji)��������еĶ˵��������磬�������ͨ��2D����ͷ���ֲ���(chu)��������(chuan)��(gan)����������������(ru)����ʵ�ָ߾��ȵIJ��������⣬Optimus��չʾ��(le)�ӹ�������(zi)���ָ���������֤����(le)���ȶ��ԺͿɿ��ԡ���Щ���ܵ������벻��ͨ������Զ�̲����ռ��Ĵ���ѵ�����ݣ���Щ����ΪOptimusִ�и����ӵ������ṩ��(le)��ʵ�Ļ���(chu)��
��(ce)���벿��Optimus����(te)˹����������ʵ������(huan)���н�����(le)�㷺(fan)�IJ�(ce)�ԣ������������(zhu)Ŀ�����Ų�(ce)�Ե���(shen)��(ru)���˹���(gan)Ԥ�ʳ����½�������Optimus�Ѿ��ܹ�(gou)��Ϊ��������ɹ�������ͬʱ��Optimus�������ٶȺ;�(ju)��Ҳ�ڲ�����������Ϊ���ڸ��㷺(fan)��Ӧ�ó����з������ô�����(le)����(chu)����(te)˹����(ji)���ڽ����ǰ����(zi)�ҹ�������ʹ��Optimusִ�����õĹ�������Ԥ��(ji)������г�(chao)��1000���ڹ���ʹ�ã���������2025���ǰ���������г���
Optimus�ļ���������Ҫ��(ti)��������ָ���������ϣ�����־��иߴ�(da)11����(zi)�ɶȣ�δ��(lai)��(ji)������22��(zi)�ɶȣ��������߱���(chu)����(gan)֪�����������ڲ���Ҫ����ά�������(kuang)�³��ܴ���������(ti)���������⣬Optimus���䱸��(le)�Ƚ���Զ�̲�������(jian)��ʹ���������Ա�ܹ�(gou)���VR�۾��������е��ӳٵ�ʵʱ���ơ�Ϊ��(le)ʵ�ָ�Ч�������ռ���ѵ������(te)˹��������(le)���ģ�Ļ�������(tuan)�ӣ�����(an)����(le)ѵ�����ص��������Ա���ж��ְ������ȷ(que)����(le)������ʼ�մ�(chu)��(yu)æµ״̬��
��(te)˹��Robotaxi��Ԥ��(ji)10�·�����������
��(te)˹��RobotaxiԤ��(ji)��10�·�������˹��(ke)���ڹɶ�����ʾ��(te)˹��Robotaxi������Uber��Airbnbģʽ�Ľ�ϡ�����(ri)����(te)˹����Robotaxi�������Ƴٵ�10�¡���˹��(ke)��ʾ������Ҫ���Robotaxiǰ��������Ҫ���(ji)���ģ���(yin)�Ƴٷ�����(ri)�ڶ�(er)����(lai)�Ķ���ʱ�佫�ù�˾�л���չʾһЩ���������ݡ���
��(te)˹��FSD��V12.5����ΪRobotaxi����֮ǰ����Ҫ�ĸ��¡�
HW4.0����������5����
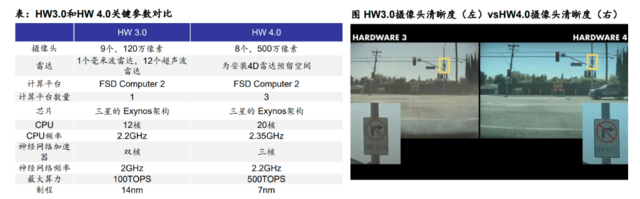
оƬ���ø��Ƚ��Ƴ̣�HW4.0 FSDоƬ��������7nm���գ�HW3.0Ϊ����14nm���գ��µ���(zi)����ʻоƬ���ܽ����ֿ���(zi)����ʻоƬ��5�����ң���������ܻ�Ϊ�ۺ��ܺ�/������������Ϊ��Ƭ��������ô��ƽ̨�������ܿ��ܴ�(da)��500TOPS����
o ����ͷ������������ͷ�������9�����ٵ�8������(dan)������ͷ�������ȴ�120������������500���أ���ʹ��HW4.0���б�3.0��ǿ�ĸ�(gan)֪��������Զ̽��(ce)��(ju)��ɴ�(da)424��(mi)��ɨ��ä�������ǡ�
o Ԥ���״�(da)�ӿڣ���(dan)model YĿǰδ�䱸�״�(da)��HW 4.0Ԥ����(le)װ���״�(da)�Ŀ�(kong)�䣬��(dan)��model Y�ڳ���ʱ�����߱��״�(da)���ܣ����������(te)˹������ƫ(pian)���Ӿ����������ͳ��������ɱ�����(yin)���йأ�ͬʱҲΪ�û��ṩ��(le)һ����ѡ(xuan)���(kong)�䡣
o CPU�ں���������66.67%��FSD Computer 2�������ӵ�3����CPU���棬HW4.0��3.0��12�ˣ���������(le)20�ˣ��ں���������66.67%����(ji)��ƽ̨���棬��ȻHW4.0��(reng)Ȼ���õ���FSD Computer 2����(dan)������ȴ���ӵ���(le)3����
HW5.0��AI5����������10����
o��(te)˹��2024��ɶ���ᣬ��(te)˹��CEO��˹��(ke)��ʾ��Ŀǰ��(te)˹�����ڿ��������(dai)������ʻӲ��(jian)��HW5.0�����佫������(ming)ΪAI5.0��Ŀǰ�Ѿ������(le)HW5.0�����(ji)�������ܽ���HW4.0��10����Ԥ��(ji)��Լ(yue)18�������Ƴ���
o HW4.0 �������� HW3.0 �� 5 ����HW5.0 ������Ԥ��(ji)5000TOPS��
AI����Robotaxi��
�ٶ�Apollo ADFM��ȫ(quan)����֧��ȫ(quan)��(wu)�˼�ʻ����(zi)����ʻ��ģ�͡�֧��1500ƽ����������3���½�����Ӫ��������չ�ٶ�����6����
o ������L4����(zi)����ʻ�������з������쳣�������ڶ���������(yu)������ij�����ҵ�Ѳ�ȡ(qu)��ս��ת(zhuan)�͡����ԣ�ת(zhuan)��(er)Ͷ����(yu)L2+��������ʻ�г��ļ��ҽ����С��ܲ�������2024���һ�����ṩ��(le)82.6����(zi)����ʻ���з���ͬ������25%���ۼ�(ji)�ṩ�����ѳ�(chao)��600��
o ��������Robotaxi��(wan)��,��С�����С���Զ֪�С�AutoX���εεȡ����εκͰ�(an);��Auto X���⣬������ҵ����ٶȴ��ڽ�����ֵ(zhi)��ע(zhu)����ǣ�С���������ܲ�������L4������(zi)����ʻ�����Ŀ��Ʋ����ϴ����������죬���ֲ������(shen)ԶӰ��Զ�̰�(an)ȫ(quan)Ա����(wu)�˳�֮������Ч�ʡ�����(ti)��(er)�ԣ�С�����в��õ��ǡ�Զ�̸�������remote assist��ģʽ����ģʽ�Գ�������(zi)���������������(le)����Ҫ������ֱ�Ӳٿس������ƶ���ת(zhuan)����ϵͳ����(er)��ͨ���ṩ����ķ�ʽ���ó�����(zi)���жϲ�ִ�в���������ģʽ�£�Ŀǰ���˳��ȴ�(da)����(le)1:5��������(wang)������������1:10����(xiang)��֮�£��ٶ����������(yu)��Զ�̿��ơ���remote control���ķ�ʽ���˳�ЭͬЧ���복�����ܻ�ˮƽ֮���ƽ����ȡ(qu)�Ὣ��Ϊ�ؼ����⡣
���ܲ�����Robotaxi������(te)˹��FSD��(ru)����(luo)��·������
��(te)˹��Robotaxi���й�����(luo)��·��Ԥ��(ce)�ɲο��ܲ����ܡ�
o �ܲ�������һ�����е���(luo)�ش��°�����(yi)��˳����У�����(zi)����ʻ����(an)ȫ(quan)Ա�ڼ�ʻ����--��(wu)�˼�ʻ����(an)ȫ(quan)Ա�ڸ���ʻ����--��ȫ(quan)��(wu)�˼�ʻ����(yi)�����ϰ�(an)ȫ(quan)Ա������ÿ(mei)�����Ƚ��в�(ce)�ԣ���(zai)�ṩ��������ʵ����ҵ�����У��շѣ���
o ����Ա���(lai)�����ܲ����ܱ���ҵ����������(zao)����Ŀ�ƽ���Ϊ�Ƚ���2022��8��8��(ri)���ܲ��������人��Ӫ�������º��(bian)�ɹ�����շ�����֤������ʼ�ṩ��ȫ(quan)��(wu)�˼�ʻ����
o ��Ϊ��(te)˹��FSD���й����е�·��(ce)�Ե���վ(zhan)���Ϻ��ܿ���Ҳ���ΪFSD��(ru)���ĵ�һ�����С�����ܲ������ڱ�����ҵ���ƽ�ʱ���ߣ���(te)˹���ܿ������Ϻ���ɴ���(ru)���IJ�(ce)�Ժ���(zai)�������������з�(fan)�����š�
��(wu)ͼ����NOA���¶�����������
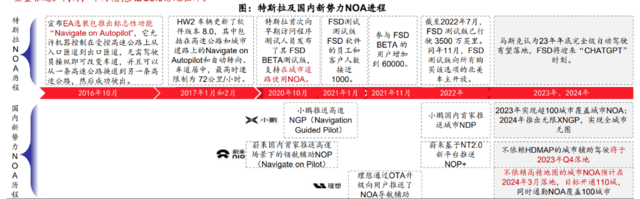
��(te)˹�����ȶ��壬����������������ֲ������߾���ͼ�ij���NOA����ǰ��������ȫ(quan)��ת(zhuan)����(wu)ͼ��
o ��(te)˹������������NOA����(te)˹����(yu)2016��10�������Ƴ�����NOA��Navigate on Autopilot�����ܣ�������(le)����(zi)����ʻ�Ľ�����2020��ĩ��ε(wei)��(lai)��С����������(xiang)����ͻ�������NOA��
o ����NOA���¶���������������(te)˹����(yu)2020��10�£��״�����(zao)�ڷ��ʳ����(ce)����Ա������(le)��FSD BETA��(ce)�棬֧���ڳ��е�·ʹ��NOA����־����������ˮƽ�����¶��塣 2022��ĩ��С����Ϊ������������û�������(le)����NGP��2023��3�£������(ji)��������all in��(zi)����ʻ��2023��5�£�װ�仪ΪADS2.0���ʽ�ʵ����(wu)ͼ����NOA��2024��2�£�С���Ƴ���(wu)��XNGP��7�£�����2024�����ܼ�ʻ�ļ������ᣬ������(wu)ͼNOA��(ji)��ȫ(quan)�����͡�ͬʱ����ΪǬ��ADS3.0��(luo)���ڼ�(ji)��
������ɾ�����������ߣ�����ʦ���糽��S1190524010002������(lai)Դ��̫ƽ��֤ȯ��ԭ�ı��⣺���ܲ�����Robotaxi����(te)˹����AIʱ��
��(feng)����ʾ����������
�г��з�(feng)�գ�Ͷ������������IJ����ɸ���Ͷ�ʽ��飬Ҳδ���ǵ������û���(te)���Ͷ��Ŀ�ꡢ��(cai)��״��(kuang)����Ҫ���û�Ӧ���DZ����е��κ��������(guan)�������Ƿ��������(te)��״��(kuang)���ݴ�Ͷ�ʣ�������(zi)����